
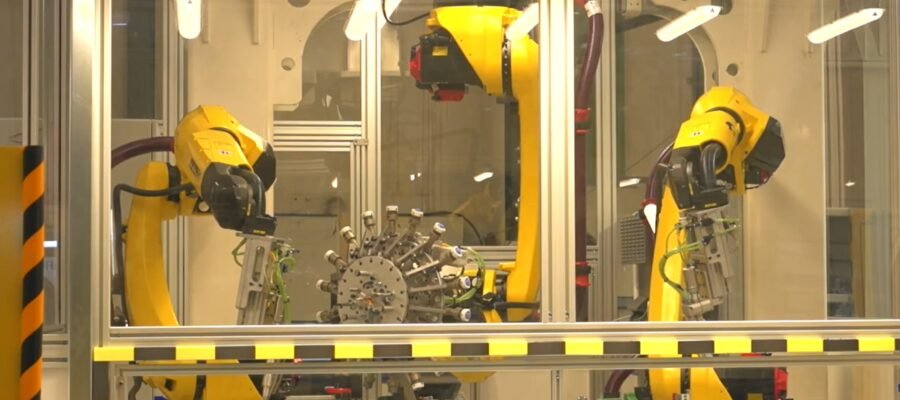
En el mundo de la automatización, la precisión es la regla de oro, cuando hablamos de la programación de brazos articulados, entender cómo se mueve un robot en el espacio es vital.
Aunque solemos pensar en coordenadas cartesianas (X, Y, Z), la naturaleza rotativa de los motores (servos) hace que el uso de sistemas polares sea mucho más eficiente.
En este artículo, exploraremos cómo la geometría y el cálculo integral permiten definir el espacio de trabajo de un robot.
Índice
¿Por Qué Usar Coordenadas Polares en Robótica?
Un brazo articulado funciona mediante ángulos de rotación y extensiones radiales, aquí es donde entra la fórmula de área en coordenadas polares, a diferencia del plano cartesiano, el sistema polar nos permite calcular el «alcance» o la zona de cobertura de un brazo robótico de forma natural, utilizando el radio (r) y el ángulo (θ ).
El Espacio de Trabajo del Robot
El espacio de trabajo de un robot es el conjunto de todos los puntos que su extremo puede alcanzar, para un brazo que rota, este espacio suele ser un círculo o un sector circular, para determinar la superficie exacta que un robot puede «barrer» en una mesa de trabajo, aplicamos el cálculo de área en coordenadas polares.
Para programar trayectorias complejas, no basta con saber dónde está el robot; necesitamos calcular superficies de barrido para evitar colisiones o para procesos de pintura y soldadura automatizada.
La integral de área en coordenadas polares es la herramienta clave, la fórmula general que aplicamos en el software de control es:
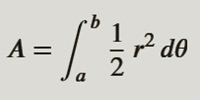
Donde:
- A: es el área de la región.
- r=r(θ): Es la función que describe la distancia radial desde el origen.
- α y β: Son los límites de integración.
En la programación de brazos articulados, esta integral nos permite optimizar el consumo de energía al calcular la trayectoria más corta dentro de una superficie específica.
Newton las usó para describir las órbitas de los planetas, ya que es mucho más fácil calcular el área de una elipse planetaria partiendo de un foco (el Sol) usando ángulos que usando coordenadas rectangulares.
Ejercicio de Área en Coordenadas Polares
Si estás estudiando ingeniería o programación de PLC, practicar con ejercicios de área en coordenadas polares es fundamental. Imagina el siguiente escenario técnico:
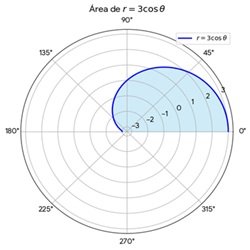
Problema: Un brazo robótico tiene un sensor que barre una zona definida por la función r=3Cosθ. ¿Cuál es el área total que el sensor puede monitorear?
- Identificar la curva: En este caso, es un círculo desplazado.
- Plantear la integral: Usamos la fórmula de área que es:
3.-Resolviendo: Aplicando la identidad trigonométrica para y substituyendo en la integral, obtenemos la superficie de cobertura exacta.

De donde se deduce que el área es: 9π/4
Conclusión
La intersección entre el cálculo integral y la robótica es lo que permite que la industria actual sea tan precisa.
Dominar la programación mediante sistemas polares no solo mejora la eficiencia del código, sino que facilita el diseño de celdas de trabajo seguras y optimizadas.
¿Quieres Profundizar más en la Cinemática de Robots?
Si te interesa llevar estos conceptos a la práctica, te recomendamos buscar guías sobre cinemática inversa y cómo convertir estos datos polares a comandos de movimiento para actuadores reales.